SUMOBOT
OUTLINE
For the Embedded Systems course, our final project was to build and program a “sumobot.” The final goal for this project was to compete with other sumobots in the final competition. Two sumobots would be placed in the ring, with the outer edge marked by a light tape. The two robots must compete to navigate automatically to stay within the ring and push the opponent off. The following will outline the intended design and functionalities of the robot, as well as methods for testing them.
Design Requirements:
- Must be scoop proof from all directions
- Must have easily accessibly batteries
- Must have accessibly inside
- 2 line sensors
- 2 IR sensors
- 2 Wheels
- LCD
- 2 Switches
- 2 Ball wheels
Planning
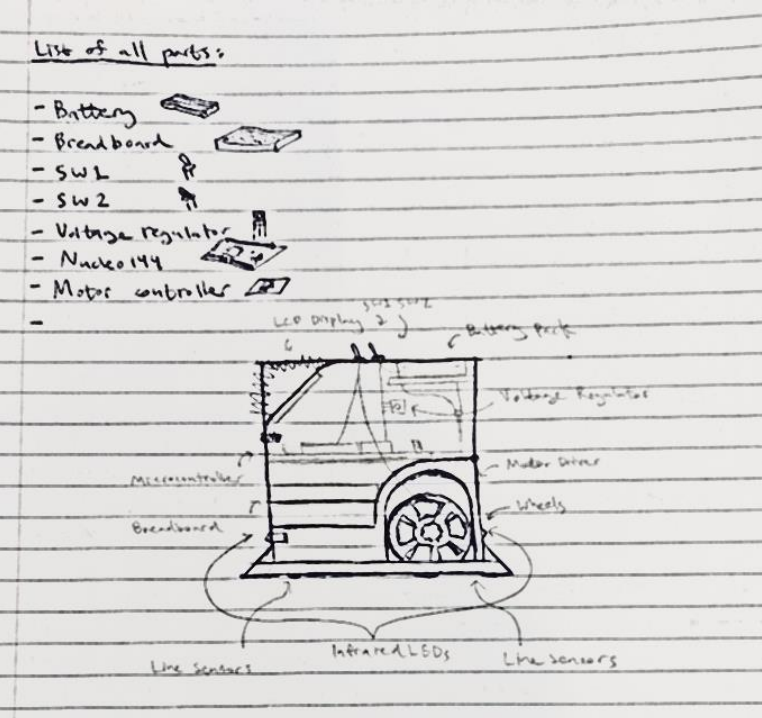 Chassis & Power
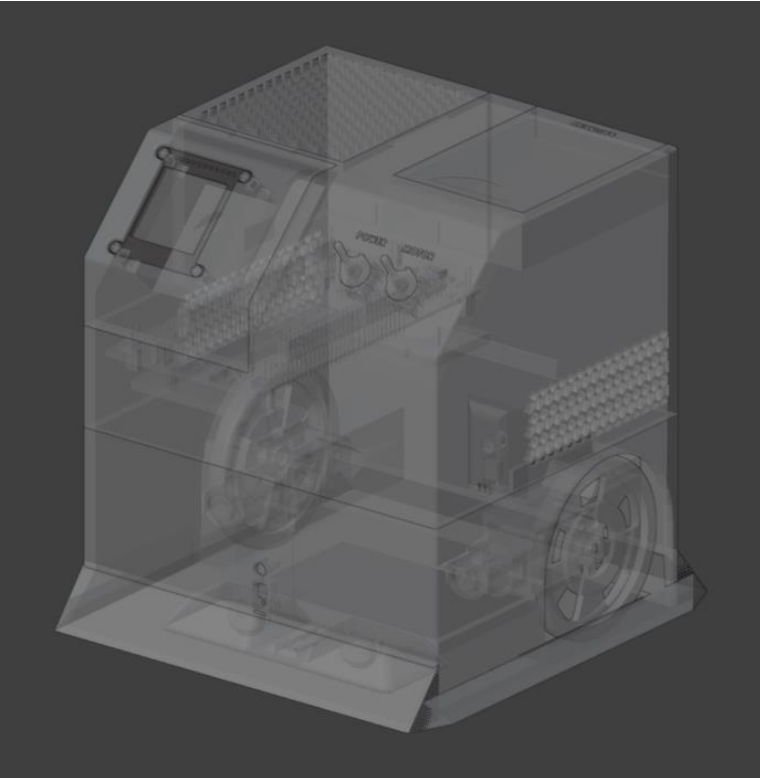
Chassis & PowerIn this part, the robot chassis was designed and built, and the power system was wired to control power to the whole robot with a switch, and control power to the motor to the other. Planning was first done on paper, then the models were made in Blender3D with exact fitments and margins for the electronic and mechanical parts. The models were printed in the maker lab.
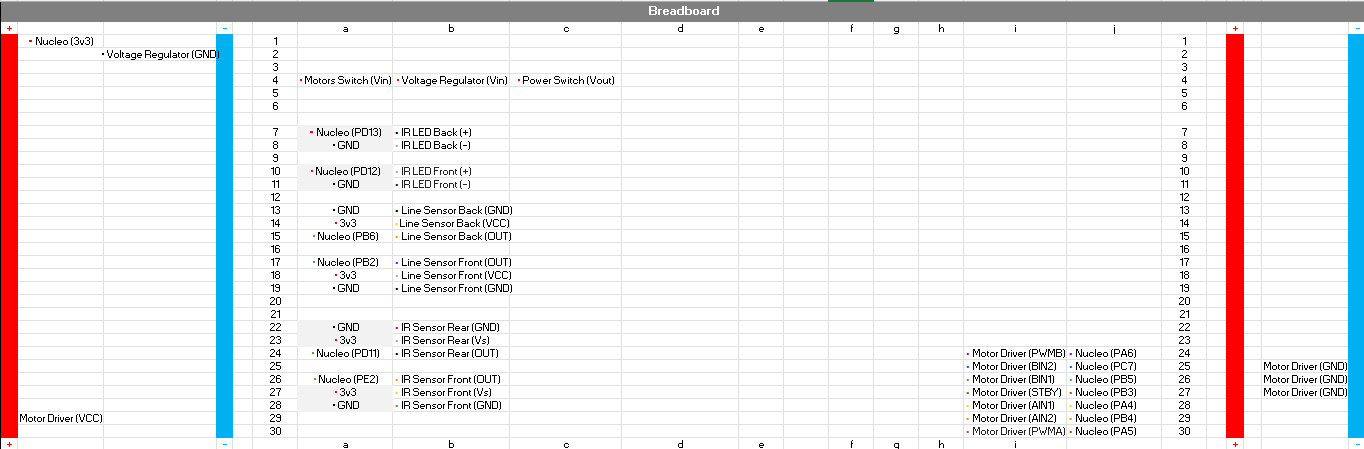
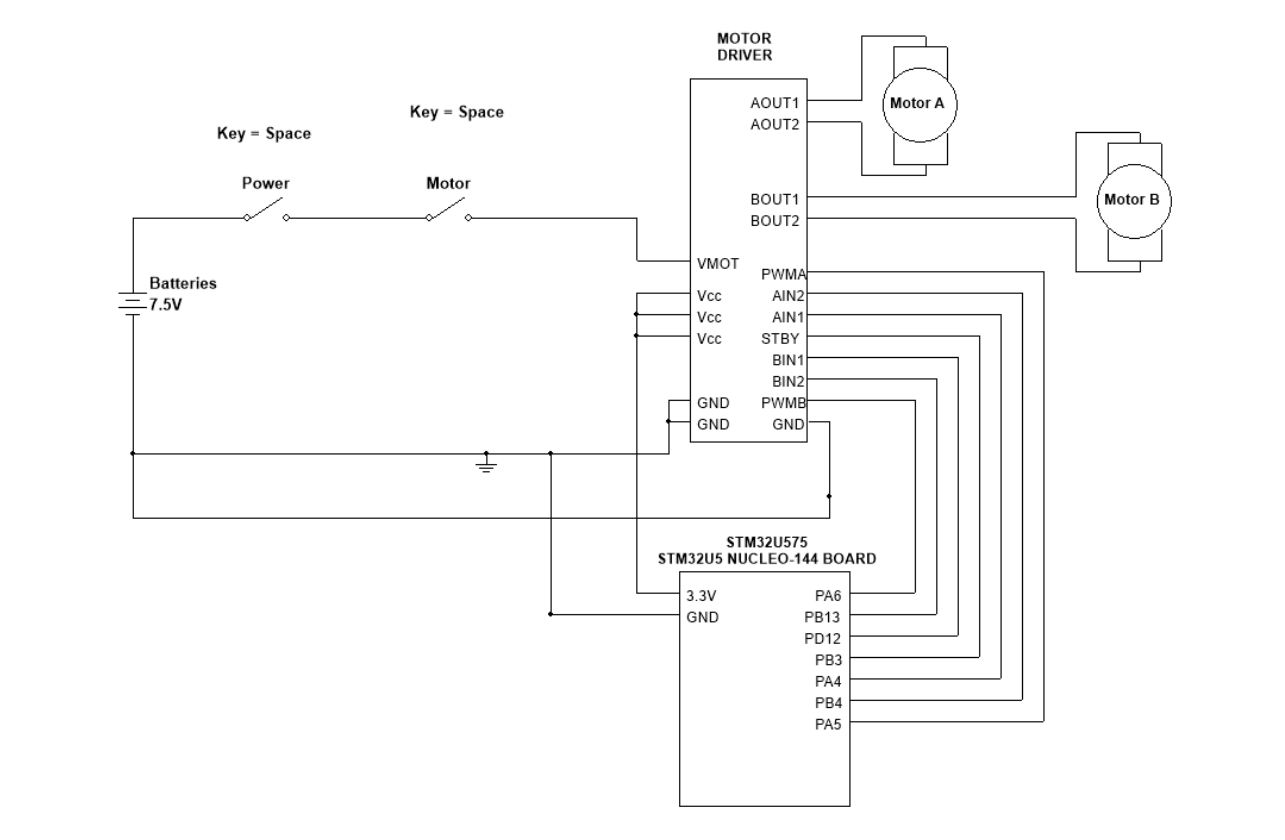
The power subsystem is meant to deliver electrical power to all parts of the robot that need it. The source of power is a series of five 1.5V AA batteries, which initially outputs 7.5 volts. To power the Nucleo144 microcontroller from its 5V_EXT pin, the 7.5 V source goes through a 5V voltage regulator. The microcontroller board outputs 3.3 V from its GPIO and 3v3 pins, which goes to different components connected through a breadboard, including pins on the motor driver, IR transmitters and receivers, and line sensors. The only pin connected to 7.5 V from the batteries is Vmot on the motor driver. There are 2 switches to control power. The first one opens and closes the connection of the batteries to the whole rest of the robot. The second one opens and closes the connection of the batteries to the motors only, for controlled testing and debugging.

 Functionality
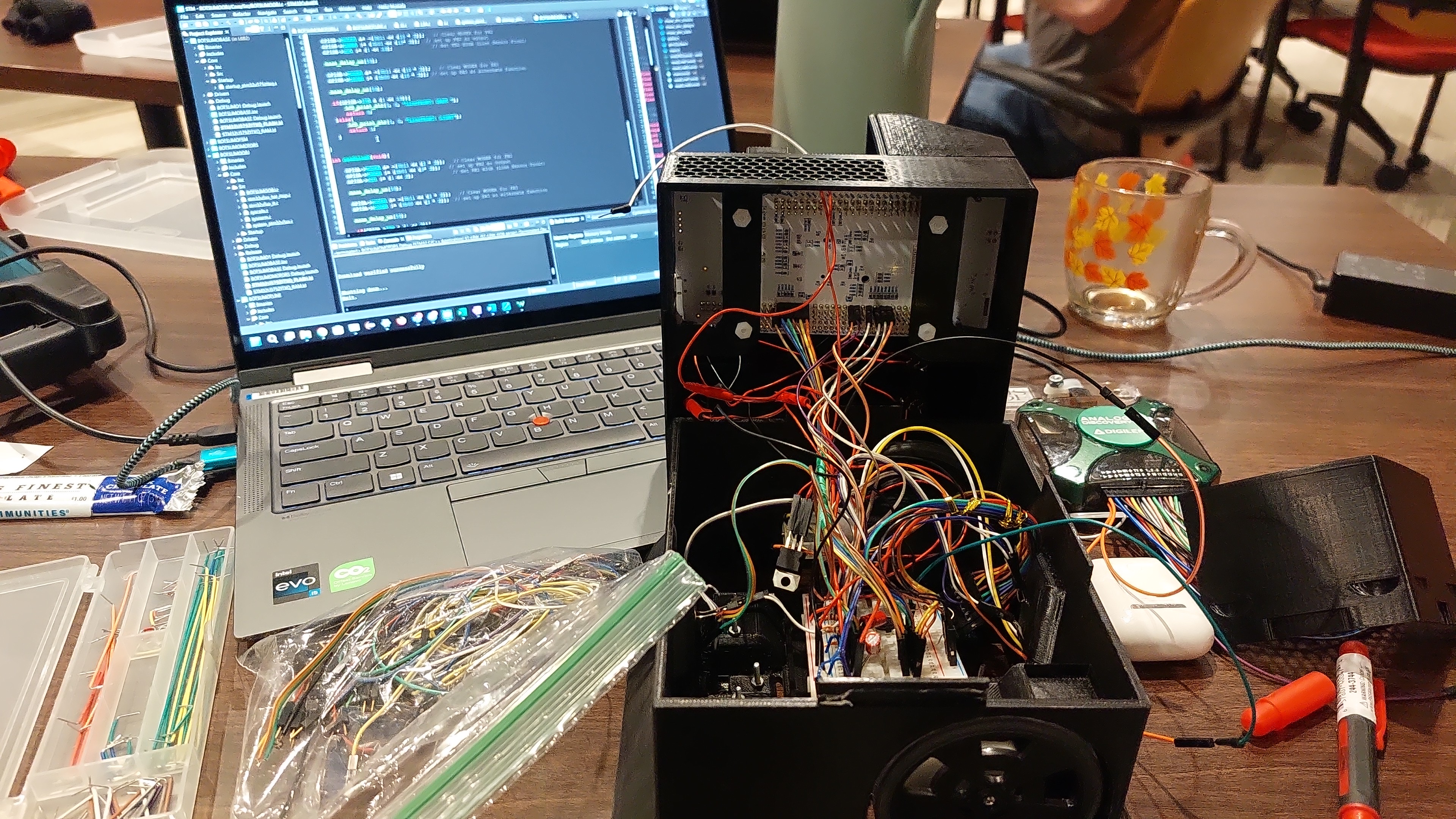
FunctionalityIn this section, I developed the subsystems and system behaviors.
The motion subsystem is meant to either stop or run the motors at a specific speed and in a specific direction. Given the source voltages, the motor driver has three pins for each of the two motors. When IN1 and IN2 are both high, the motor stops. Depending on the orientation of the connection of wires to the motor, IN1 high and IN2 low will cause the direction of spin to be one way, and IN1 low and IN2 high will cause the direction of spin to go the opposite way. There will be a PWM signal sent to the PWM pin, at 4 kHz. The duty cycle of this oscillation will determine the speed of the motor, the peak speed from the duty cycle being at about 60 percent.
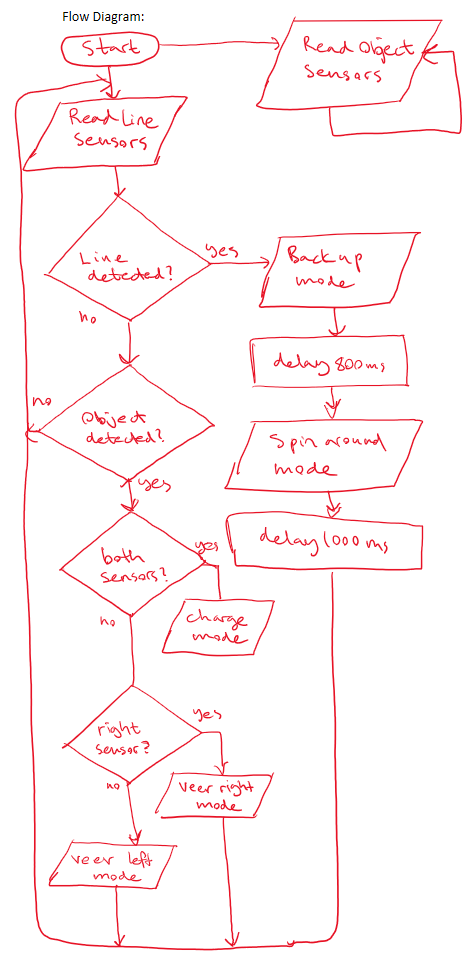
 The line sensing subsystem uses 2 digital line sensors. Each line sensor has the pins, Vin, Vout, and GND. Vin must be receiving 3.3 V to function. To see whether the line sensor is seeing light or dark, the microcontroller outputs 3.3 V to Vout on the line sensor. A delay of 50 us allows the capacitor to discharge, then the GPIO pin is set to input mode and read in. If read high, then the line sensor is seeing dark. If read low, then the line sensor is seeing light.
The line sensing subsystem uses 2 digital line sensors. Each line sensor has the pins, Vin, Vout, and GND. Vin must be receiving 3.3 V to function. To see whether the line sensor is seeing light or dark, the microcontroller outputs 3.3 V to Vout on the line sensor. A delay of 50 us allows the capacitor to discharge, then the GPIO pin is set to input mode and read in. If read high, then the line sensor is seeing dark. If read low, then the line sensor is seeing light.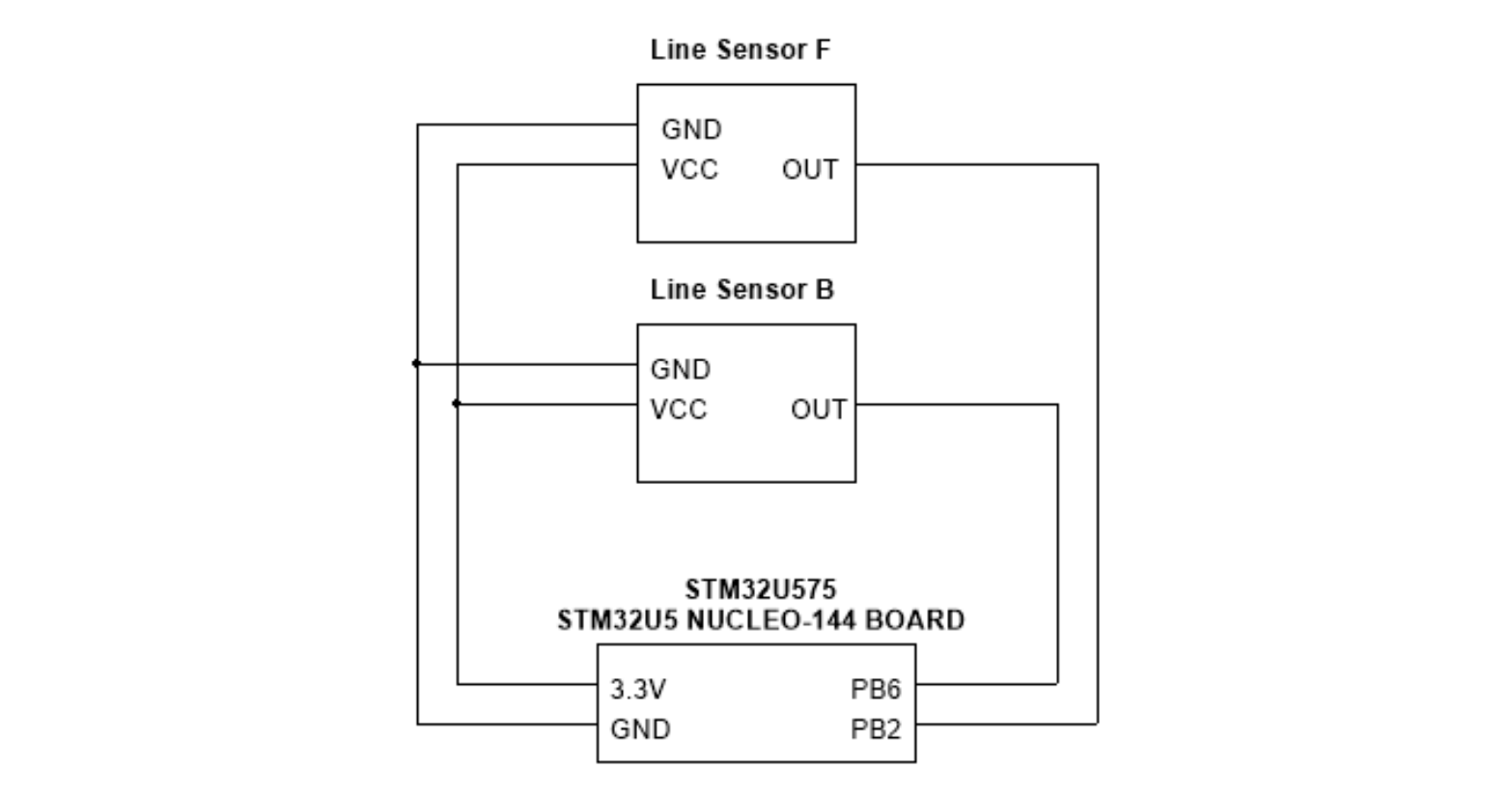 The object sensing subsystem uses two pairs of front-facing IR transmitters and receivers, one on the right side and one on the left side. The transmitters emit pulses of IR signals at 38 kHz, then turn off and the receiver reads whether it is detecting anything.
The object sensing subsystem uses two pairs of front-facing IR transmitters and receivers, one on the right side and one on the left side. The transmitters emit pulses of IR signals at 38 kHz, then turn off and the receiver reads whether it is detecting anything.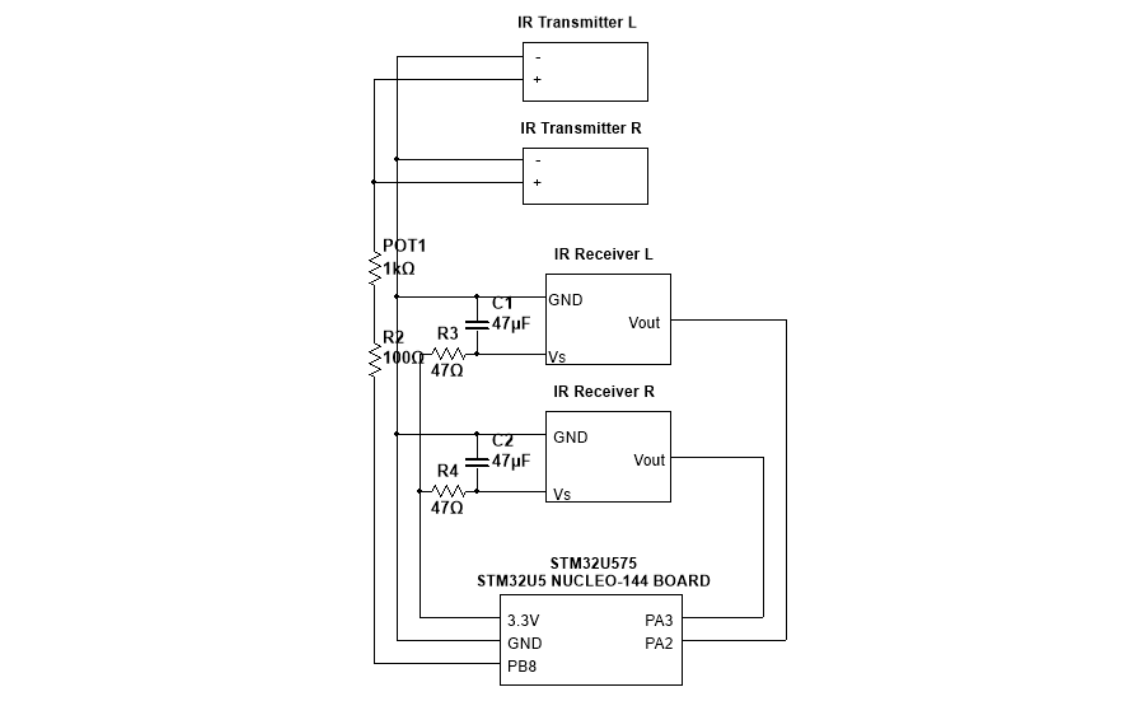 The object sensing subsystem uses two pairs of front-facing IR transmitters and receivers, one on the right side and one on the left side. The transmitters emit pulses of IR signals at 38 kHz, then turn off and the receiver reads whether it is detecting anything.
The object sensing subsystem uses two pairs of front-facing IR transmitters and receivers, one on the right side and one on the left side. The transmitters emit pulses of IR signals at 38 kHz, then turn off and the receiver reads whether it is detecting anything.CONCLUSION
This has been the best class I've taken in university yet. I've learned incredible new amounts of information about how embedded systems work, from the coding to the physical connections and electrical voltages and signals. After taking this class, I feel like I have the foundations to make anything I want, almost like an uncovered hidden knowledge. Actually, this is the class that gave me the confidence to start my drone project, which is still ongoing. Endless new potential has been unlocked!
 < Back
< Back